

Pixiv - KiraraShss
Welcome to my blog
816 words
4 minutes
Machine Learning : Recurrent Neural Network
Intro
- 具有記憶的神經網路
- 適合處理序列資料 (NLP)
在每一步RNN都會通過當前的輸入與隱藏狀態計算出現在的隱藏狀態 :
然後再把隱藏狀態轉換成輸出 :
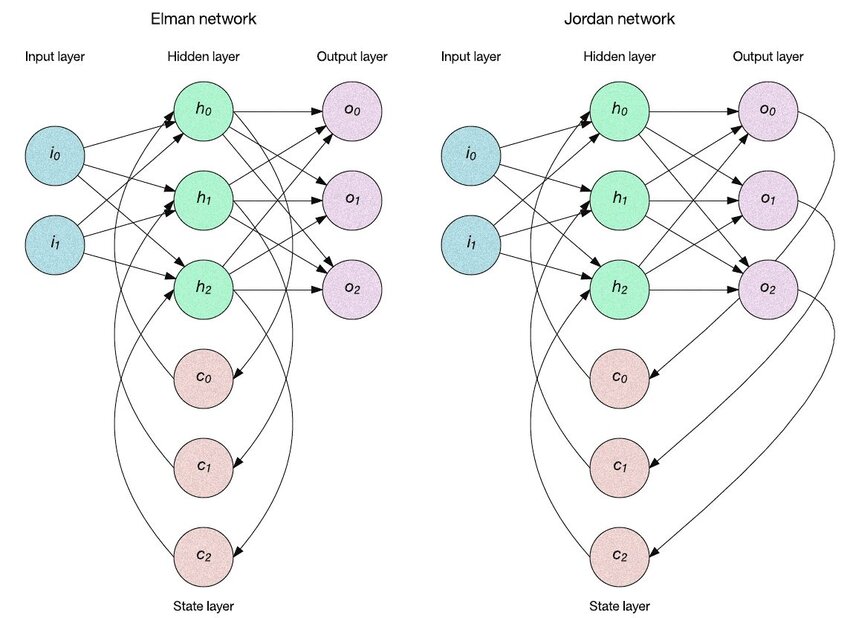
Jordan Network
Elman Network的recurrent經過延遲後作為現在這個layer的輸入,但Jordan是把輸出層當作記憶
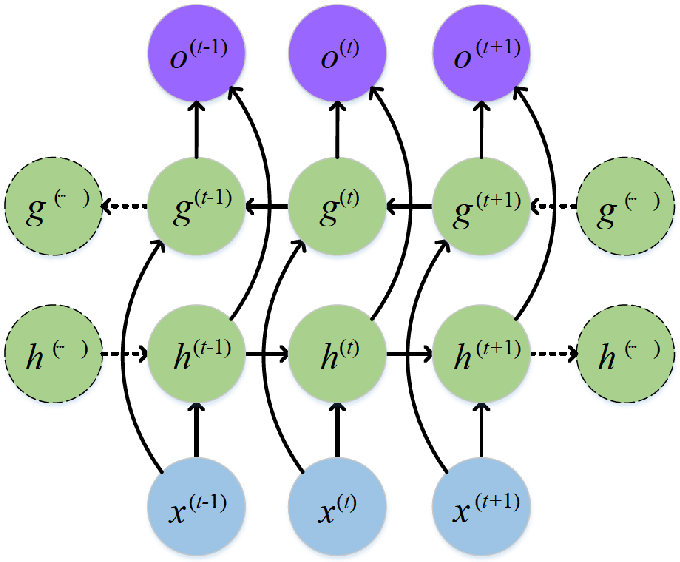
Bidirectional Network
當序列資料整筆都是可預測的 (例如NLP任務),利用雙向RNN可以更好的理解上下文
RNN的缺點
- 遺忘資訊 : 因為每個時間步模型都會更新隱藏狀態 (矩陣乘法),如果權重小於1,就會導致前一個隱藏狀態的影響快速縮小
- 訓練不穩定
- 使用時間反向傳播 (BPTT),在每個時間點上展開成一個前向傳播的NN
- 反向傳播一直乘權重 + 激活,導致梯度消失
- 反之則會導致梯度指數增長,需要引入正則化
RNN的優點
- 高靈活性 : 可以處裡多種序列對序列的架構 (一對一、一對多、…)
- 用途 : 圖像描述(一對多) / 語意分類(多對一) / 翻譯(多對多) / 影片分類(多對多) / 文本生成(一對多/多對多)
LSTM
- 用來解決長距離依賴
- 顯式記憶 (記憶細胞)
- 加上Gate來控制記憶單元的進出流量 (正則化)
Memory Cell
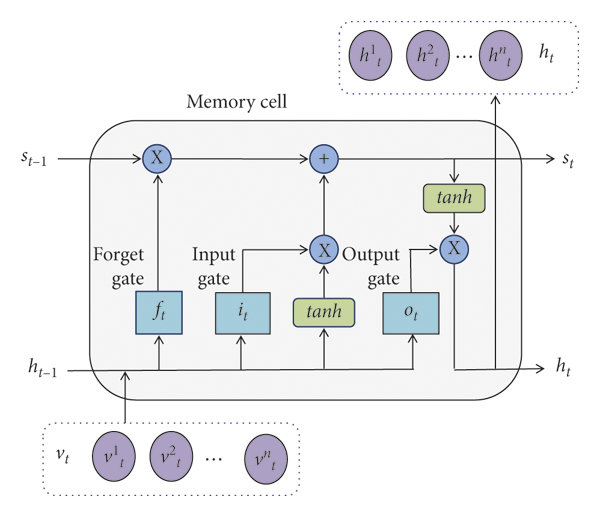
圖中沒有標明的矩陣操作都是加法
-
輸入 :
- 當前的輸入
- 前一個隱藏狀態
- 前一個記憶
-
輸出 :
- 更新後的隱藏狀態、記憶
- 輸入、輸出閘門,遺忘閘門 (使用Sigmoid, 0-1可以用來表示開關程度)
- 候選記憶 (tanh)
-
記憶細胞 () 是一個向量
- 資訊在裡面流動,保持不變
- 遺忘閘門 : 用來決定是否遺棄舊的記憶
- 輸入閘門 : 控制輸入
-
輸出閘門先用Sigmoid生成,接著與縮放過後的記憶(tanh)做乘法,得到
可以總結如下 :
- (候選記憶)
- (用舊的記憶 + 現在的候選記憶)
BPTT
- 在時間點上展開、梯度下降 :
- 學習權重以及bias權重 :
GRU
- 更新閘門同時控制前一個隱藏狀態以及新增輸入的保留量 :
- 重製閘門用來控制計算候選記憶時的重製量 :
- 候選記憶 : 先重製再與輸入做加法 :
- 最後用加權平均生成記憶 :
- 參數更少,更好訓練
Forecasting
- 需注意資料量、資料品質、趨勢、意外事件…
- RNN以外的方法 : 自回歸、移動平均模型
- RNN的優勢 : 抗躁能力強、同時支援線性/非線性、多變數、多步預測
- LSTM with Attention : 權衡不同時間的重要性,專注在比較重要的那幾筆資料
- 用來預測故障 (智慧製造)
Reference
{kind=link}
Machine Learning : Recurrent Neural Network
https://blog.cyberangel.work/posts/machine-learning-rnn/ Last updated on 2025-05-31,187 days ago
Some content may be outdated